Operator Theoretic Methods for Data-Driven Analysis and Control of Dynamical Systems
Duality in stability and control from linear operator perspective:
We have introduced novel operator theoretical methods for stability analysis and optimal control design for dynamical systems.
The transformative idea we proposed is to shift the focus from the point-wise nonlinear evolution of dynamical systems on the finite-dimensional state space to ensemble linear evolution of functions on
infinite dimensional space. With every nonlinear dynamical system, one can associate two linear operators called Perron-Frobenius (P-F) and Koopman operators.
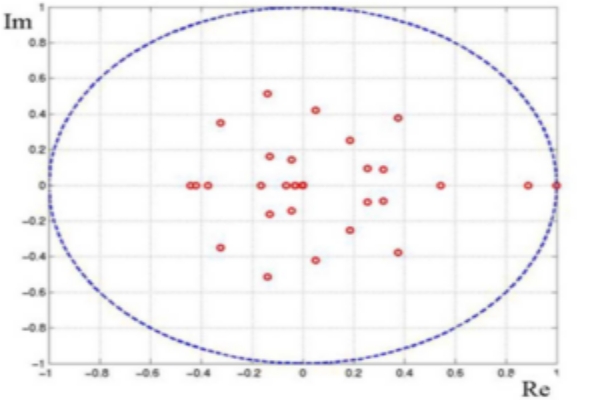

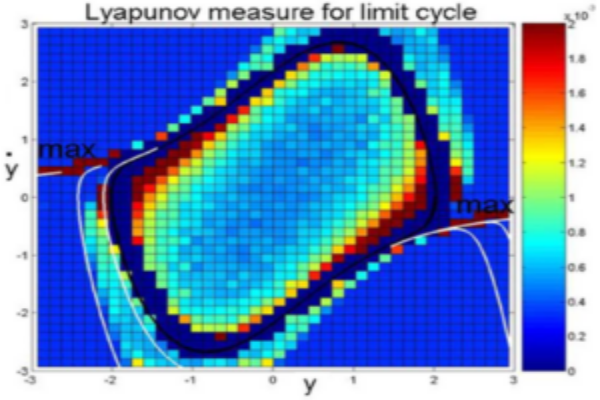
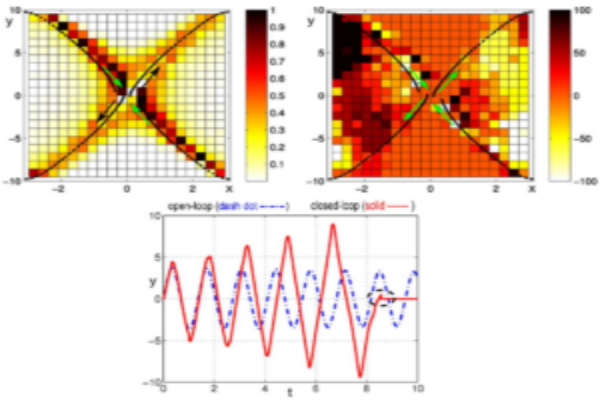
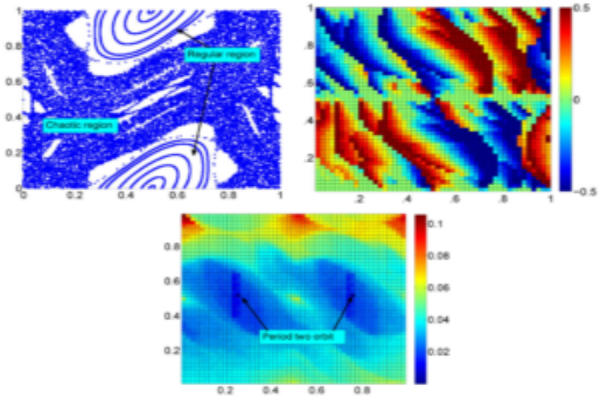
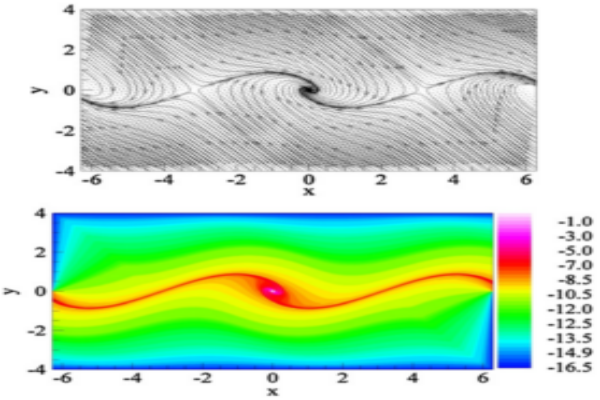
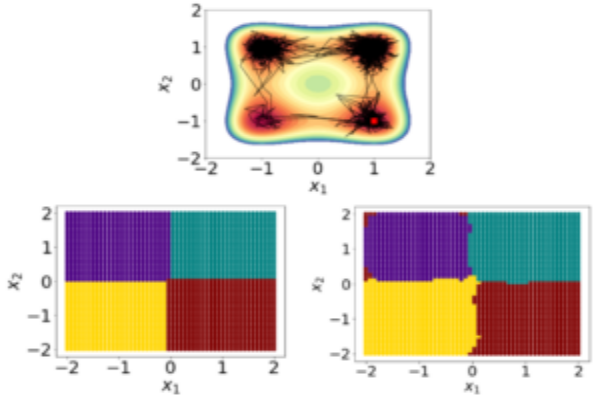
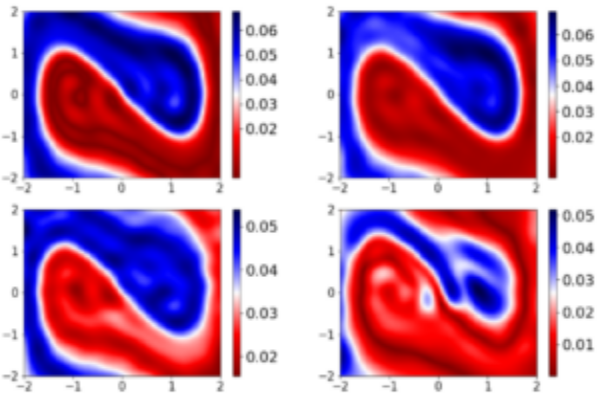
Both these operators provide for the linear description of nonlinear dynamics in the space of densities. This linear description of nonlinear dynamics can be effectively used to analyze and control a nonlinear system.n particular, using a linear transfer P-F operator, we introduce the Lyapunov measure as a new tool for verifying weaker set-theoretic notions of almost everywhere stability. The Lyapunov measure is shown to be dual to the Lyapunov function. Unlike the Lyapunov function, systematic linear programming-based computational methods are proposed to compute the Lyapunov measure.
This duality in stability theory between the Lyapunov function and the Lyapunov measure also extends to the optimal control of deterministic and stochastic systems. This duality leads to a convex formulation of optimal control problems in the dual space of densities. These duality results, combined with the data-driven methods discovered for the finite-dimensional approximation of linear operators, are employed to design data-driven optimal control of nonlinear systems. This proposed research aims to find a comprehensive analytical and computational framework for the data-driven control of a dynamical system that explicitly accounts for the finite amount of data available for control.