Cyber-Physical Systems
Fundamental limitations for control of dynamical systems over networks:
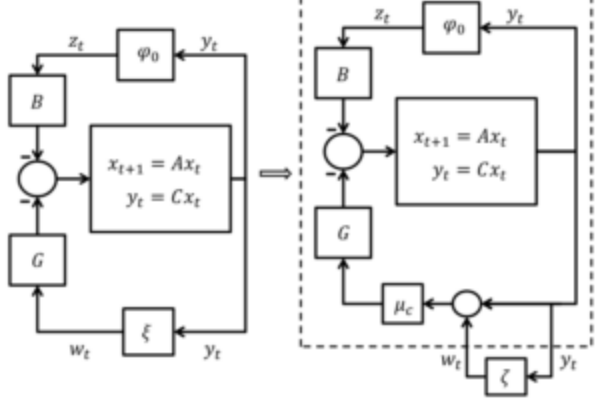
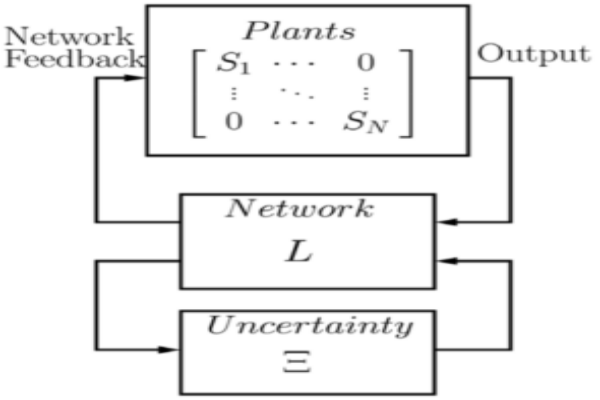
We have discovered a systematic framework for analyzing and designing network-controlled systems in the presence of uncertainty.
This includes discovering fundamental limitation results for estimating and stabilizing nonlinear systems over uncertain communication channels.
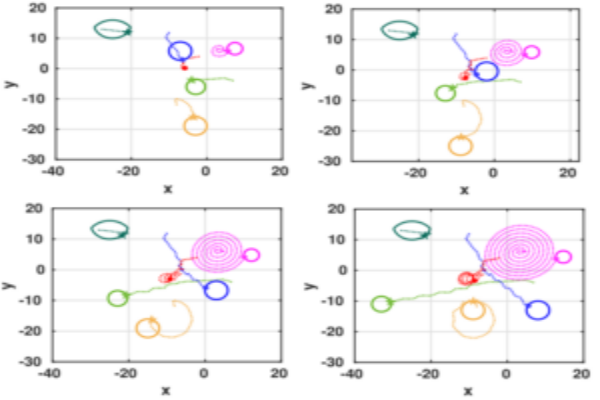
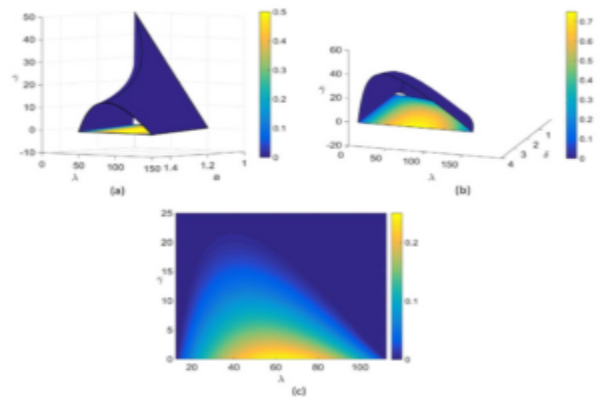
This research mainly connected fundamental limitations for nonlinear stabilization and estimation with the measure-theoretic entropy of steady-state invariant measure of
the open loop system. The positive Lyapunov exponents capture the measure-theoretic entropy for a system with non-equilibrium open loop dynamics such as chaotic attractors
or unstable limit cycles.
This was the first systematic result to highlight the critical role of non-equilibrium dynamics in nonlinear stabilization and estimation over uncertain channels, and it differs from the existing results based on equilibrium dynamics of local linearization of a nonlinear system. Our results generalize existing results known in the case of linear systems where Lyapunov exponents emerge as a natural generalization of eigenvalues from linear systems to nonlinear systems.